Getting Started with TS-ICL — Imputation#

TS-ICL is a probabilistic Time Series Foundation Model (TSFM) that unifies forecasting and imputation in a single zero-shot architecture, requiring no task-specific training.
This notebook focuses on the imputation use case: given a time series with missing values encoded as NaN, TS-ICL reconstructs them with probabilistic predictions.
What you will learn#
Run zero-shot imputation with pointwise and block missingness
Leverage exogenous covariates to sharpen imputation quality
Leverage sparse exogenous covariates
Interpret predictions — median, IQR bands, and empirical coverage
Process multiple series efficiently via batch inference
Tips & best practices
Performance at a glance#
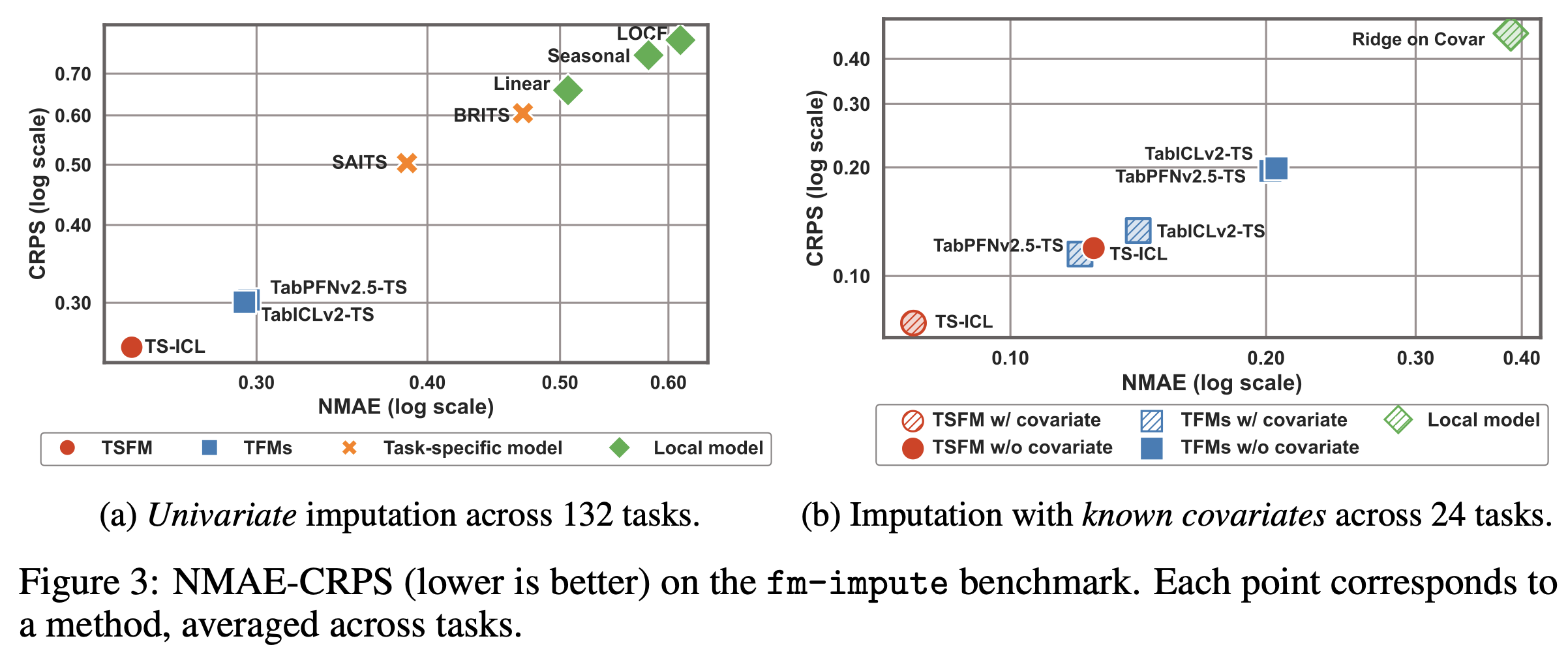
On the fm-impute-bench benchmark (132 univariate tasks - 1.3M windows and 24 covariate-aware tasks):
+17% NMAE / +15% CRPS over the best Tabular Foundation Model (TabICLv2-TS) in the univariate experiments
~50× faster at inference — 6.5 ms per window on an H100 GPU
With relevant covariates, an additional ~38% improvement over the no-covariate variant
Installation#
[ ]:
# Install the TS-ICL package (skip if already installed)
!pip install tsicl -q
Imports#
[2]:
import numpy as np
import torch
import matplotlib.pyplot as plt
from pathlib import Path
import sys, os
sys.path.insert(0, os.path.join(os.getcwd(), "../"))
from tsicl.pipeline import TSICL
from tsicl.plot.imputation import plot_sample_imputation
# Reproducibility
np.random.seed(42)
torch.manual_seed(42)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"PyTorch {torch.__version__} | device: {device}")
PyTorch 2.9.1 | device: cpu
Loading the Model#
The tsicl-v1.ckpt file contains two specialised TS-ICL checkpoints that share the same architecture but were trained on different tasks: one for imputation and the other for forecasting. You can find the checkpoint in the TS-ICL Hugging Face repository.
Checkpoint |
Training masking |
Use case |
|---|---|---|
``imputation`` |
Random pointwise + block masking, bidirectional context |
Reconstruct missing values anywhere in the window |
``forecasting`` |
Causal right-side masking only |
Predict future values from a clean look-back |
Set MODEL_PATH to your downloaded checkpoint, or enable allow_auto_download=True for automatic fetching.
[3]:
# ── Update this path to your local checkpoint ─────────────────────────────
MODEL_PATH = Path("../checkpoints/tsicl-v1.ckpt")
model = TSICL(
model_path = MODEL_PATH,
allow_auto_download = False
)
print("✅ Model loaded")
✅ Model loaded
Part 1 — Univariate and Covariate-Aware Imputation#
Architecture in brief ▸
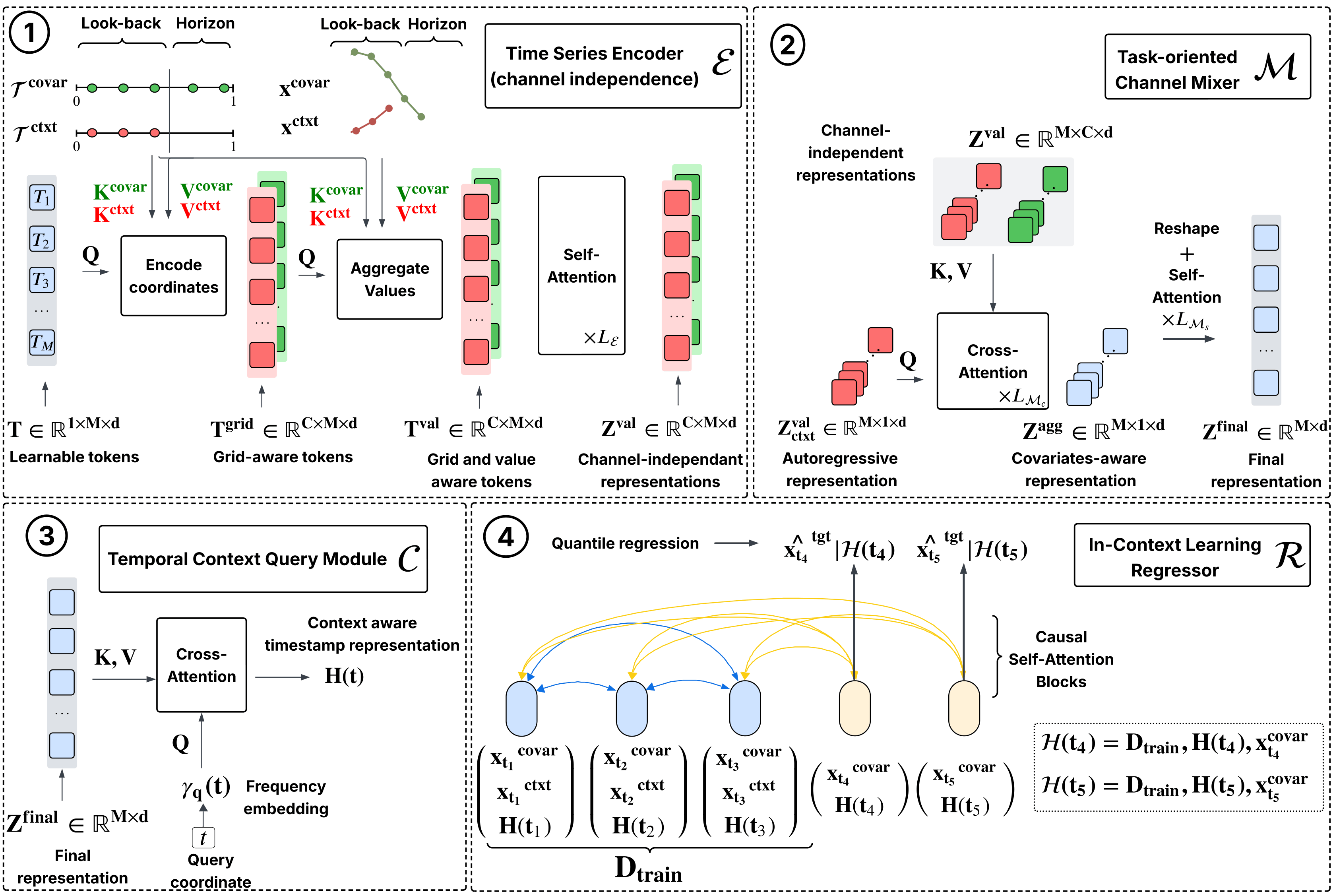
TS-ICL processes each time series through four successive modules:
Time Series Encoder
𝓔— a Perceiver-style architecture that compresses the observed (timestamp, value) pairs into M = 32 learnable latent tokens via cross-attention. It accepts inputs of arbitrary length without any preprocessing.Channel Mixer
𝓜— aggregates information across channels via cross-attention. In the univariate case this is a simple self attention operation; when covariates are present, it selectively integrates their latent representations into the target’s representation.Temporal Context Query Module
𝓒— maps any query timestamp to a context-aware embedding using Fourier (NeRF-style) positional encoding + cross-attention. Querying at arbitrary timestamps is what makes the model naturally handle missing values and irregular grids.In-Context Regressor
𝓡— a causal Transformer that reads the observed (representation, value) pairs as “in-context training examples” and predicts quantiles at the target (missing) positions using causal self-attention.
Key input convention#
TS-ICL is designed to be highly flexible, supporting various time series structures and alignment conditions.
(i) Supported Formats & Shapes
We natively accept inputs as NumPy arrays or Tensors (e.g., PyTorch).
Input Type |
Supported Shapes |
Description |
|---|---|---|
Main Inputs |
|
T: Number of observed time steps, N: Number of series (e.g. batch size). |
Covariates (``covars``) |
Same as inputs or a |
T’: Number of time steps, K: Number of covariate features. Can be structured matching the inputs, listed individually, or passed as a 3D tensor. |
(ii) Missing Data & Alignment
Partially Observed Covariates: Covariates do not need to be fully observed.
Unaligned Inputs: Main inputs do not strictly need to be perfectly aligned.
⚠️ Note on Missing or Unaligned Data: If your covariates are not fully observed or your inputs are not aligned, please refer to the tips section at the end of the notebook.
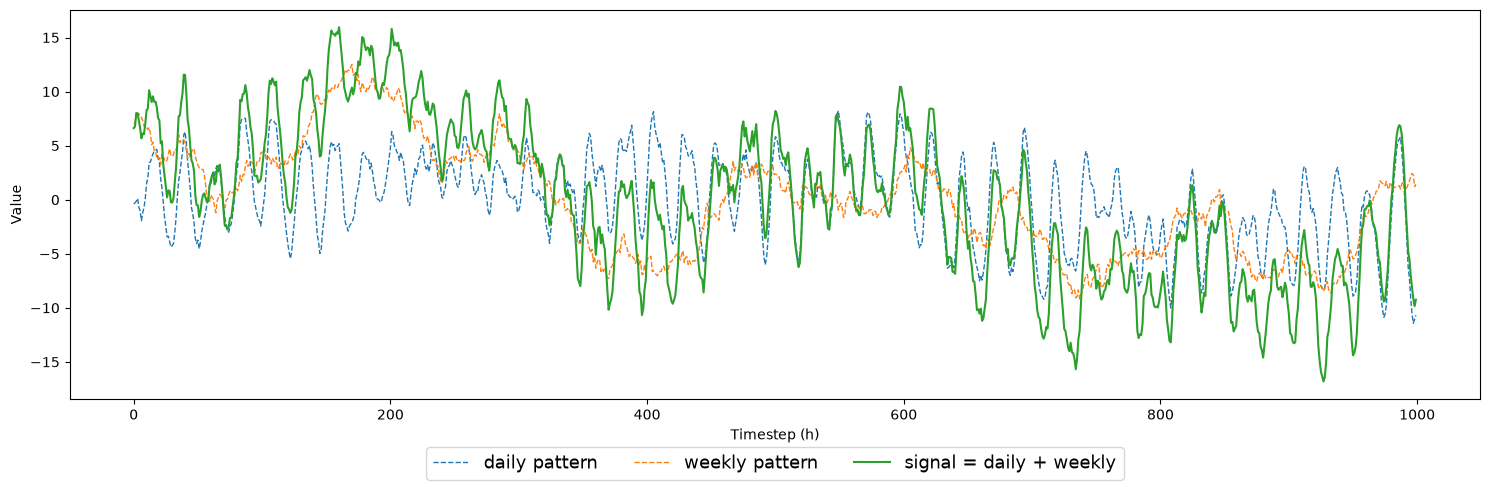
We generate a 1 000-point signal using two Gaussian Process draws:
``daily_pattern`` — periodic at 24 h with a slow-varying envelope (ExpSineSquared × Matérn)
``weekly_pattern`` — periodic at 168 h with a slow-varying envelope (ExpSineSquared × Matérn)
The two components are added to form the target signal. Keeping them separate lets us later use weekly_pattern as a covariate — a clean analogue of real-world scenarios where a low-frequency exogenous driver (temperature, irradiance) is continuously observed.
[4]:
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import ExpSineSquared, Matern
random_state = 91
np.random.seed(random_state)
T = 1000
t = np.arange(T, dtype=float).reshape(-1, 1)
# Daily pattern (period = 24 h)
kernel_daily = ExpSineSquared(length_scale=1.5, periodicity=24.0) * Matern(length_scale=200.0, nu=0.5)
gp_daily = GaussianProcessRegressor(kernel=kernel_daily, random_state=random_state)
daily_pattern = gp_daily.sample_y(t, random_state=random_state).flatten()
daily_pattern = 4.0 * (daily_pattern - daily_pattern.mean()) / daily_pattern.std()
# Weekly pattern (period = 168 h)
kernel_weekly = ExpSineSquared(length_scale=3.0, periodicity=168.0) * Matern(length_scale=500.0, nu=0.5)
gp_weekly = GaussianProcessRegressor(kernel=kernel_weekly, random_state=random_state)
weekly_pattern = gp_weekly.sample_y(t, random_state=random_state).flatten()
weekly_pattern = 5.0 * (weekly_pattern - weekly_pattern.mean()) / weekly_pattern.std()
signal = daily_pattern + weekly_pattern
t = t.flatten() # reshape back to 1-D for plotting
plt.figure(figsize=(15, 5))
plt.plot(t, daily_pattern, "--", lw=1.0, label="daily pattern")
plt.plot(t, weekly_pattern, "--", lw=1.0, label="weekly pattern")
plt.plot(t, signal, lw=1.5, label="signal = daily + weekly")
plt.xlabel("Timestep (h)")
plt.ylabel("Value")
plt.legend(loc="upper center", bbox_to_anchor=(0.5, -0.10), ncol=3, fontsize=13, frameon=True)
plt.tight_layout()
plt.show()
1.1 Pointwise missingness (50%)#
We randomly mask half the observations, simulating sensor dropouts or data-transmission errors. Each masked position will be independently imputed from the surrounding context.
[5]:
missing_rate = 0.50
mask_point = np.random.random(T) < missing_rate # True → missing
signal_masked = signal.copy()
signal_masked[mask_point] = np.nan
print(f"Missing: {mask_point.sum()} / {T} ({100 * missing_rate:.0f}%)")
Missing: 522 / 1000 (50%)
The model accepts the masked signal directly — missing values are encoded as NaN, no separate mask tensor is needed.
model.impute() returns two tensors:
``batch_p`` — point estimate, shape
[N, C, T, 1](usepoint_estimator='median'or'mean')``batch_q`` — quantile predictions, shape
[N, C, T, Q]
where N = batch size, C = number of channels (1 for univariate), T = window length, Q = number of requested quantile levels. Squeeze the channel dimension to get [N, T, 1] and [N, T, Q].
Predictions are produced at all T timesteps — both observed and missing — so you can freely evaluate coverage at any subset of positions.
[6]:
quantile_levels = [0.01, 0.05, 0.1, 0.2, 0.25, 0.3, 0.5, 0.7, 0.75, 0.8, 0.9, 0.95, 0.99]
batch_p, batch_q = model.impute(
inputs = signal_masked, # 1-D numpy array of length T; [N,T,1] tensor also accepted
batch_size = 1,
device = device,
quantile_levels = quantile_levels,
point_estimator = "median", # 'mean' is also available
denormalize = True # return predictions in the original scale
)
# batch_p (median estimation): [T]
# batch_q (quantiles estimation): [T, Q]
pred_mean = batch_p.cpu().numpy() # [T, 1]
pred_quantiles = batch_q.cpu().numpy() # [T, Q]
print(f"Point prediction shape : {pred_mean.shape}")
print(f"Quantile prediction shape: {pred_quantiles.shape}")
Point prediction shape : (1000,)
Quantile prediction shape: (1000, 13)
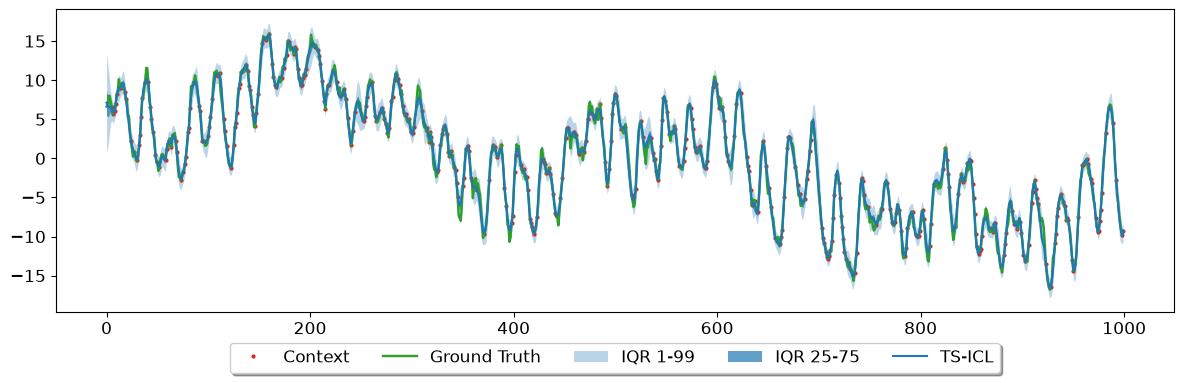
plot_sample_imputation is included in the TS-ICL package. It overlays the ground truth, the observed context points, the median prediction, and the requested IQR bands.
[7]:
fig, ax = plot_sample_imputation(
quantiles = pred_quantiles, # [T, Q]
y_ctx = signal_masked,
y_true = signal,
show_context_points = True,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL",
iqr_bands = ((0.01, 0.99), (0.25, 0.75))
)
plt.show()
plt.close()
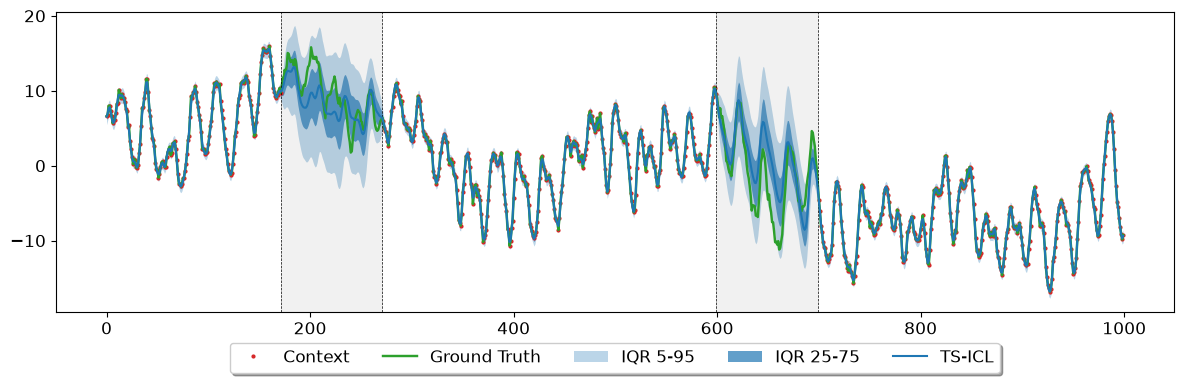
1.2 Block missingness (two 100-point contiguous gaps)#
Contiguous gaps arise from planned maintenance, device resets, or communication outages. In many energy datasets — for instance the fm-impute-bench evaluation — these are the dominant missingness pattern (up to four one-day gaps per four-week window).
The time-indexed formulation of TS-ICL handles block gaps natively: the encoder simply ignores the NaN positions, and the regressor predicts quantiles at each missing timestamp conditioned on the surrounding context. No code change is needed compared to the pointwise case.
[8]:
mask_block = np.zeros(T, dtype=bool)
BLOCK_STARTS = [172, 600]
for s_t in BLOCK_STARTS:
mask_block[s_t : s_t + 100] = True
signal_block = signal.copy()
signal_block[mask_block] = np.nan
print(f"Missing: {mask_block.sum()} / {T} ({100 * mask_block.mean():.1f}%)")
_, batch_q_block = model.impute(
inputs = signal_block, # 1-D numpy array, same as section 1.1
batch_size = 1,
device = device,
quantile_levels = quantile_levels,
denormalize = True
)
pred_block_no_covar = batch_q_block.cpu().numpy() # [T, Q]
fig, ax = plot_sample_imputation(
quantiles = pred_block_no_covar,
y_true = np.array(signal),
y_ctx = np.array(signal_block),
show_context_points = True,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL",
is_blockwise = True,
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
Missing: 200 / 1000 (20.0%)
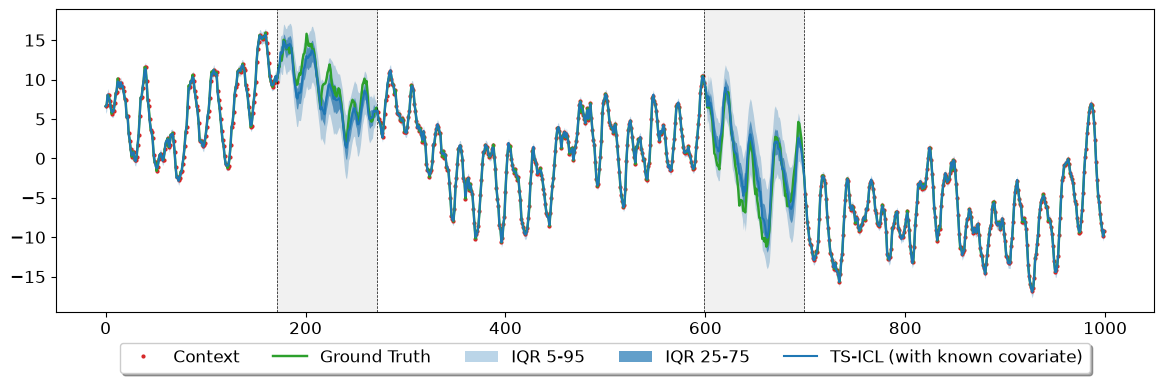
1.3 Imputation with a Known Covariate#
Many real-world sensors share an underlying physical driver: when one goes offline, its correlated neighbours keep recording. TS-ICL accepts any number of exogenous time series alongside the target and uses them to sharpen its predictions — without retraining.
Examples evaluated in the paper (French transmission-system operator data):
Target |
Covariate |
Physical coupling |
|---|---|---|
Wind-farm power output |
Wind speed |
Power ∝ wind³ |
Solar PV production |
Surface solar irradiance |
Power ∝ irradiance |
National electricity load |
Mean outdoor temperature |
Temperature significantly impacts electricity demand levels |
In each case the covariate is fully observed across the entire window — including during the target’s missing blocks — providing the model with a precise low-frequency anchor.
Our signal is the sum of daily_pattern and weekly_pattern. During a 100-point (~4-day) gap, the daily context visible on each side of the gap leaves the low-frequency weekly phase ambiguous: the model cannot reliably tell where in the 168-h cycle the gap falls, leading to wide uncertainty bands and possible phase errors.
By supplying weekly_pattern as a fully-observed covariate — available across all 1 000 timesteps including the gap — we give the model a direct view of the weekly pattern. It can then focus its predictive effort on the daily fluctuations, producing sharper and more accurate estimates.
[9]:
# ── Inference WITH covariate ──────────────────────────────────────────────────
_, batch_q_covar = model.impute(
inputs = signal_block,
batch_size = 1,
covars = weekly_pattern, # shape [T] → internally broadcast to [1, T, 1]
device = device,
quantile_levels = quantile_levels,
denormalize = True
)
pred_block_covar = batch_q_covar.cpu().numpy() # [T, Q]
fig, ax = plot_sample_imputation(
quantiles = pred_block_covar,
y_true = np.array(signal),
y_ctx = np.array(signal_block),
show_context_points = True,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL (with known covariate)",
is_blockwise = True,
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
[10]:
# ── Inference WITH sparse covariate (observed every 3 hours) ────────────────────────────────────────────────
weekly_pattern_masked = weekly_pattern.astype(float)
mask = np.arange(len(weekly_pattern_masked)) % 3 != 0
weekly_pattern_masked[mask] = np.nan
_, batch_q_covar = model.impute(
inputs = signal_block,
batch_size = 1,
covars = weekly_pattern_masked, # shape [int(T/3)]
device = device,
quantile_levels = quantile_levels,
allow_auto_complete = True, # Impute covar then impute target
denormalize = True
)
pred_block_covar_sparse = batch_q_covar.cpu().numpy() # [T, Q]
fig, ax = plot_sample_imputation(
quantiles = pred_block_covar_sparse,
y_true = np.array(signal),
y_ctx = np.array(signal_block),
show_context_points = True,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL (with sparse covariate)",
is_blockwise = True,
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
Quantitative comparison#
The table below evaluates predictions at the masked positions only and measures two things:
MAE (↓) — accuracy of the median forecast
Mean WQL (↓) — Weighted Quantile Loss across all quantile levels, assessing both calibration and sharpness
[11]:
# ── Build quantile lookup ─────────────────────────────────────────────────────
q_idx = {q: i for i, q in enumerate(quantile_levels)}
y_true_missing = signal[mask_block]
def block_mae(preds):
return np.mean(np.abs(y_true_missing - preds[mask_block, q_idx[0.5]]))
def block_wql(preds):
"""
Computes the Mean Weighted Quantile Loss (WQL) across all quantile levels.
This version is normalized by the absolute sum of y_true (GluonTS/Amazon Forecast standard).
At quantile 0.5, it is mathematically equivalent to WAPE.
"""
wql_per_quantile = []
sum_y_true = np.sum(np.abs(y_true_missing))
for q in quantile_levels:
y_pred = preds[mask_block, q_idx[q]]
error = y_true_missing - y_pred
# Compute Pinball Loss for the specific quantile q
pinball_loss = np.maximum(q * error, (q - 1) * error)
# Compute WQL for this specific quantile
wql_q = 2 * np.sum(pinball_loss) / sum_y_true
wql_per_quantile.append(wql_q)
# Return the average WQL across all quantiles
return np.mean(wql_per_quantile)
# ── Metric Computation ────────────────────────────────────────────────────────
mae_no = block_mae(pred_block_no_covar)
mae_co = block_mae(pred_block_covar)
mae_sparse = block_mae(pred_block_covar_sparse)
wql_no = block_wql(pred_block_no_covar)
wql_co = block_wql(pred_block_covar)
wql_sparse = block_wql(pred_block_covar_sparse)
# ── Output Results ────────────────────────────────────────────────────────────
col1_w, col2_w, col3_w, col4_w = 20, 16, 18, 20
header = f"{'Metric':<{col1_w}} {'No covariate':>{col2_w}} {' With known covariate':>{col3_w}} {' With sparse covariate':>{col4_w}}"
print(header)
print("─" * (len(header) + 12))
# MAE
check_co = '✅' if mae_co < mae_no else '⚠️'
check_sparse = '✅' if mae_sparse < mae_no else '⚠️'
print(f"{'MAE (↓)':<{col1_w}} {mae_no:>{col2_w}.4f} {mae_co:>{col3_w}.4f} {check_co} {mae_sparse:>{col4_w}.4f} {check_sparse}")
# Mean WQL
check_wql_co = '✅' if wql_co < wql_no else '⚠️'
check_wql_sparse = '✅' if wql_sparse < wql_no else '⚠️'
print(f"{'Mean WQL (↓)':<{col1_w}} {wql_no:>{col2_w}.4f} {wql_co:>{col3_w}.4f} {check_wql_co} {wql_sparse:>{col4_w}.4f} {check_wql_sparse}")
Metric No covariate With known covariate With sparse covariate
────────────────────────────────────────────────────────────────────────────────────────────────
MAE (↓) 2.4506 1.2911 ✅ 1.3555 ✅
Mean WQL (↓) 0.1991 0.1054 ✅ 0.1129 ✅
The results show a clear improvement when including exogenous features:
Fully known (``With known covariate``): Providing complete covariate information across the entire window yields the highest performance, drastically reducing both MAE and Mean WQL.
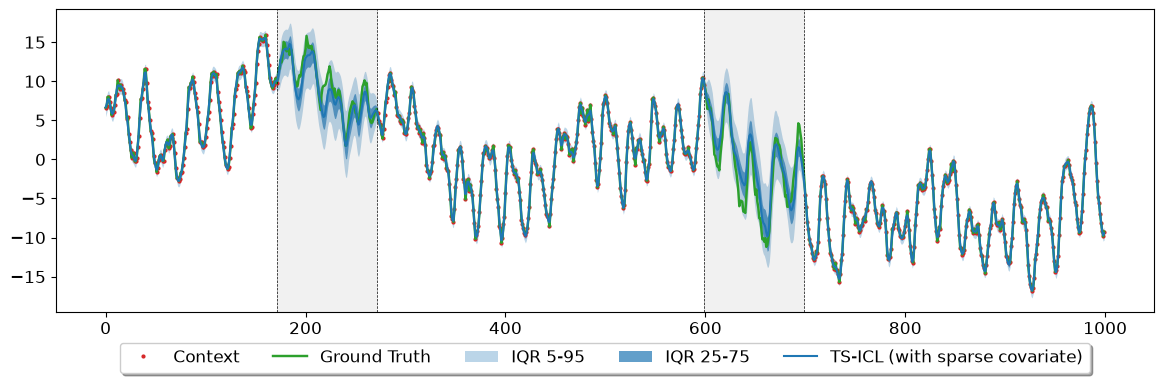
Sparse availability (``With sparse covariate``): Even when observed only every 3 timesteps (with
NaNs in between), the covariate remains highly effective. It delivers gains nearly on par with the fully known version, significantly outperforming the baseline.
TS-ICL accommodates flexible covariate patterns. The covars tensor can span:
The full window (context + missing region) — The most informative case.
Context only (covariate unknown inside the gap) — Still beneficial.
A subset of timesteps — Pass
NaNfor unobserved positions; the model natively handles sparse signals and (ifallow_auto_complete = True) can autocomplete the covariate before target inference.
To pass multiple covariates, stack them along the last dimension:
# Two covariates: shape [T, 2]
covar_2 = np.random.randn(T)
covars = np.stack([weekly_pattern, covar_2], axis=-1)
Part 2 — Understanding the Output Format#
The model returns predictions at all T timesteps (both observed and missing). In practice you evaluate only at the missing positions, but having predictions everywhere lets you use the full predictive distribution for downstream tasks such as anomaly scoring or uncertainty-aware control.
Quantile indexing and calibration check#
[12]:
# ── Inspect a single-series output from the pointwise experiment ──────────────
print(f"Shape: {pred_quantiles.shape} → {pred_quantiles.shape[0]} timesteps × {pred_quantiles.shape[1]} quantiles")
print("\nQuantile levels and column indices:")
for q, idx in q_idx.items():
print(f" [{idx:2d}] Q{int(q*100):02d} → value at t=100: {pred_quantiles[100, idx]:.3f}")
Shape: (1000, 13) → 1000 timesteps × 13 quantiles
Quantile levels and column indices:
[ 0] Q01 → value at t=100: 1.634
[ 1] Q05 → value at t=100: 2.047
[ 2] Q10 → value at t=100: 2.249
[ 3] Q20 → value at t=100: 2.478
[ 4] Q25 → value at t=100: 2.562
[ 5] Q30 → value at t=100: 2.639
[ 6] Q50 → value at t=100: 2.895
[ 7] Q70 → value at t=100: 3.143
[ 8] Q75 → value at t=100: 3.219
[ 9] Q80 → value at t=100: 3.300
[10] Q90 → value at t=100: 3.551
[11] Q95 → value at t=100: 3.767
[12] Q99 → value at t=100: 4.166
[13]:
# ── Calibration check at the masked (missing) positions ──────────────────────
y_true = signal
mae = np.mean(np.abs(y_true[mask_point] - pred_quantiles[mask_point, q_idx[0.5]]))
# Empirical coverage should match the nominal quantile level for a calibrated model
cov_80 = np.mean(
(y_true[mask_point] >= pred_quantiles[mask_point, q_idx[0.10]]) &
(y_true[mask_point] <= pred_quantiles[mask_point, q_idx[0.90]])
)
cov_50 = np.mean(
(y_true[mask_point] >= pred_quantiles[mask_point, q_idx[0.25]]) &
(y_true[mask_point] <= pred_quantiles[mask_point, q_idx[0.75]])
)
print(f"MAE at missing positions : {mae:.4f}")
print(f"80% interval coverage : {100 * cov_80:.1f}% (nominal: 80%)")
print(f"50% interval coverage : {100 * cov_50:.1f}% (nominal: 50%)")
print()
print("Coverage close to the nominal level indicates well-calibrated predictions.")
MAE at missing positions : 0.5325
80% interval coverage : 80.1% (nominal: 80%)
50% interval coverage : 46.7% (nominal: 50%)
Coverage close to the nominal level indicates well-calibrated predictions.
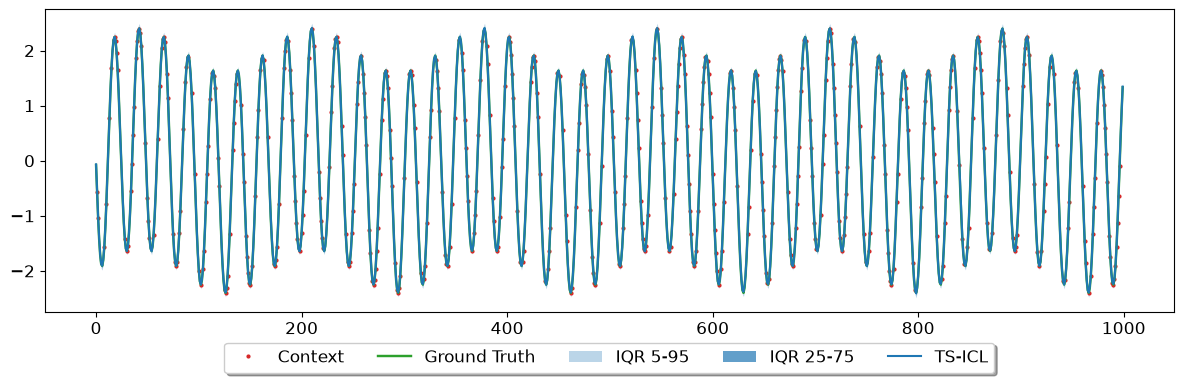
Part 3 — Batch Processing#
Stack multiple time series into a single [N, T, 1] tensor to process them in one call. The batch_size argument controls how many series pass through the model per forward pass — reduce it if you run out of GPU memory.
Variable-length series: if your series have different lengths, pass a list of
[T_i, 1]tensors instead of a stacked tensor. The model handles variable lengths natively.
[14]:
N = 8
rng_batch = np.random.default_rng(99)
phases = rng_batch.uniform(0, 2 * np.pi, size=N)
t_batch = np.arange(T, dtype=float) # 1-D array, length T
batch_signals = np.stack([
2.0 * np.sin(2 * np.pi * t_batch / 24 + phases[i])
+ 0.4 * np.sin(2 * np.pi * t_batch / 168)
for i in range(N)
], axis=0) # [N, T]
# Independent 50% pointwise mask per series
batch_masked = batch_signals.copy()
for i in range(N):
idx_m = rng_batch.random(T) < 0.50
batch_masked[i, idx_m] = np.nan
# ── Batch inference ───────────────────────────────────────────────────────────
batch_p_all, batch_q_all = model.impute(
inputs = torch.tensor(batch_masked, dtype=torch.float32).unsqueeze(-1), # [N, T, 1]
batch_size = 8, # process up to 8 series per forward pass
device = device,
quantile_levels = quantile_levels,
denormalize = True
)
preds_all_q = batch_q_all.squeeze(1).cpu().numpy() # [N, T, Q]
print(f"Batch output shape: {preds_all_q.shape} → {N} series × {T} timesteps × {len(quantile_levels)} quantiles")
Batch output shape: (8, 1000, 13) → 8 series × 1000 timesteps × 13 quantiles
[15]:
# ── Plot the first series in the batch ───────────────────────────────────────
s = 0
fig, ax = plot_sample_imputation(
quantiles = preds_all_q[s],
y_true = batch_signals[s].squeeze(),
y_ctx = batch_masked[s].squeeze(),
show_context_points = True,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
## Part 4 - Tips & Best Practices |
### Details on
|
The |
Configuration Parameters#
Parameter |
Type |
Default |
Description |
|---|---|---|---|
``batch_size`` |
|
|
The batch size used during the inference run. |
``quantile_levels`` |
|
|
Quantile levels to compute. Must be a subset of |
``device`` |
|
|
Target device for execution (e.g., |
``denormalize`` |
|
|
Whether to return values denormalized in original data space ( |
``point_estimator`` |
|
|
Sets the pointwise estimator either as the average of all quantiles ( |
``allow_auto_complete`` |
|
|
If |
``replace_by_gt`` |
|
|
The method natively reconstructs the full series. If set to |
``squeeze_output`` |
|
|
If |
Input Data Structures#
inputs#
The target time series containing missing values (NaN) to be filled. Accepts the following formats and shapes:
Multi-dimensional array-like (``torch.Tensor`` or ``np.ndarray``):
1D:
(context_length,)2D:
(batch, context_length)3D:
(batch, context_length, num_variates)wherenum_variates >= 1.List of array-likes (``List[Tensor | ndarray]``): Each element can be 1D or 2D.
1D:
(context_length,)2D:
(context_length, num_variates)Note: ``context_length`` can vary across list elements, but ``num_variates`` must remain identical.
pandas DataFrame (``pd.DataFrame``): Must be 2-dimensional with shape
(batch, context_length).
covars (Optional)#
Optional exogenous features used to support the imputation of inputs. Must be aligned on the same time grid as inputs, but can contain their own arbitrary missing values.
Multi-dimensional array-like (``torch.Tensor`` or ``np.ndarray``):
1D:
(context_length,)(Single covariate)2D:
(batch, context_length)(Single covariate)3D:
(batch, context_length, num_covariates)wherenum_covariates >= 1.4D:
(batch, num_covariates, context_length, 1)List of array-likes (``List[Tensor | ndarray]``): Each element can be multi-dimensional:
1D:
(context_length,)(Single covariate)2D:
(context_length, num_covariates)wherenum_covariates >= 1.3D:
(context_length, num_covariates, 1)
Returns#
The method returns a tuple containing (point_predictions, quantile_predictions):
``point_predictions`` (
TensororList[Tensor]) Pointwise reconstructions generated according to the specifiedpoint_estimator.
As a Tensor: Shape is
(batch, num_variates, context_length, 1)As a List: Each tensor element has shape
(num_variates, context_length, 1)
``quantile_predictions`` (
TensororList[Tensor]) Probabilistic quantile forecasts generated across all specifiedquantile_levels.
As a Tensor: Shape is
(batch, num_variates, context_length, len(quantile_levels))As a List: Each tensor element has shape
(num_variates, context_length, len(quantile_levels))
Covariate best practices#
Availability: covariates can span the full window, the context only, or be partially observed — use
NaNfor unobserved covariate positions.Number: there is no architectural limit on K. In practice, start with the most physically motivated covariates; adding redundant ones rarely hurts but increases memory.
Scale: covariates are internally normalized, so there is no need to match the scale of the target series.
Memory & throughput#
``batch_size``: reduce to 1–4 if you run out of GPU memory; the bottleneck is the context encoder, not the per-series prediction.
Maximum window: the imputation checkpoint supports up to T = 4 096 timesteps. For longer series, use a sliding-window approach and stitch the outputs together.
Inference speed: ~6.5 ms per window on an H100 GPU — roughly 50× faster than Tabular Foundation Models (Table 2 in the paper).
This notebook only scratches the surface — TS-ICL’s imputation capabilities go well beyond what’s shown here. The best way to discover them is to read the documentation and experiment with your own data!