Getting Started with TS-ICL — Forecasting#

TS-ICL is a probabilistic Time Series Foundation Model (TSFM) that unifies forecasting and imputation in a single zero-shot architecture, requiring no task-specific training.
This notebook focuses on the forecasting use case: given a look-back window, TS-ICL predicts the next H timesteps with probabilistic outputs.
What you will learn#
Run zero-shot univariate forecasting
Run zero-shot univariate forecasting with partially observed look-back window
Leverage exogenous covariates to sharpen forecasts
Leverage past-only exogenous covariates to sharpen forecasts
Interpret predictions — median, IQR bands, and empirical coverage
Process multiple series efficiently via batch inference
Tips & best practices
Performance at a glance#
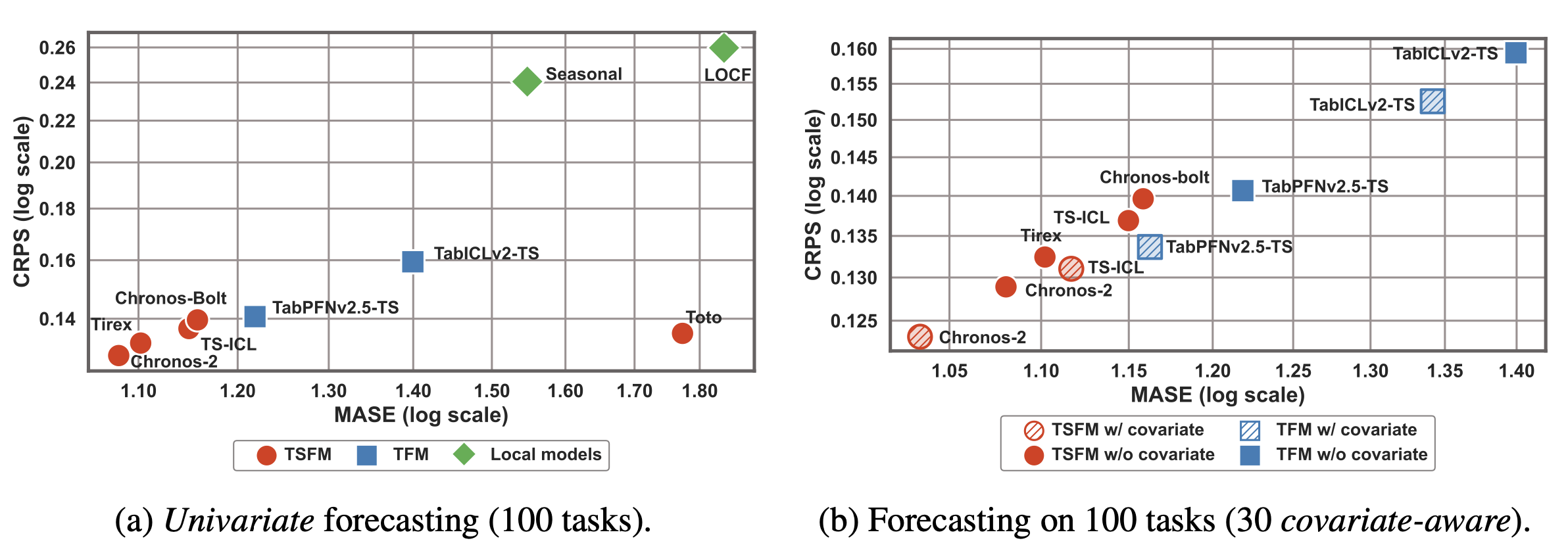
On the fev-bench benchmark (100 univariate tasks, ~235k windows):
Within ~6% MASE of Chronos-2 and ~3% of TiRex
~40× faster at inference than tabular foundation models — 15.4 ms per window on an H100 GPU
Particularly robust to missing look-back data
Installation#
[ ]:
# Install the TS-ICL package (skip if already installed)
!pip install tsicl -q
Imports#
[24]:
import numpy as np
import torch
import matplotlib.pyplot as plt
from pathlib import Path
import sys, os
sys.path.insert(0, os.path.join(os.getcwd(), "../"))
from tsicl.pipeline import TSICL
from tsicl.plot.forecasting import plot_sample_forecast
# Reproducibility
np.random.seed(42)
torch.manual_seed(42)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"PyTorch {torch.__version__} | device: {device}")
PyTorch 2.9.1 | device: cpu
Loading the Model#
The tsicl-v1.ckpt file contains two specialised TS-ICL checkpoints that share the same architecture but were trained on different tasks: one for imputation and the other for forecasting. You can find the checkpoint in the TS-ICL Hugging Face repository.
Checkpoint |
Training masking |
Use case |
|---|---|---|
``imputation`` |
Random pointwise + block masking, bidirectional context |
Reconstruct missing values anywhere in the window |
``forecasting`` |
Causal right-side masking only |
Predict future values from a clean look-back |
Set MODEL_PATH to your downloaded checkpoint, or enable allow_auto_download=True for automatic fetching.
[26]:
# ── Update this path to your local checkpoint ─────────────────────────────
MODEL_PATH = Path("../checkpoints/tsicl-v1.ckpt")
model = TSICL(
model_path = MODEL_PATH,
allow_auto_download = False
)
print("✅ Model loaded")
✅ Model loaded
Part 1 — Univariate and Covariate-Aware Forecasting#
Architecture in brief ▸
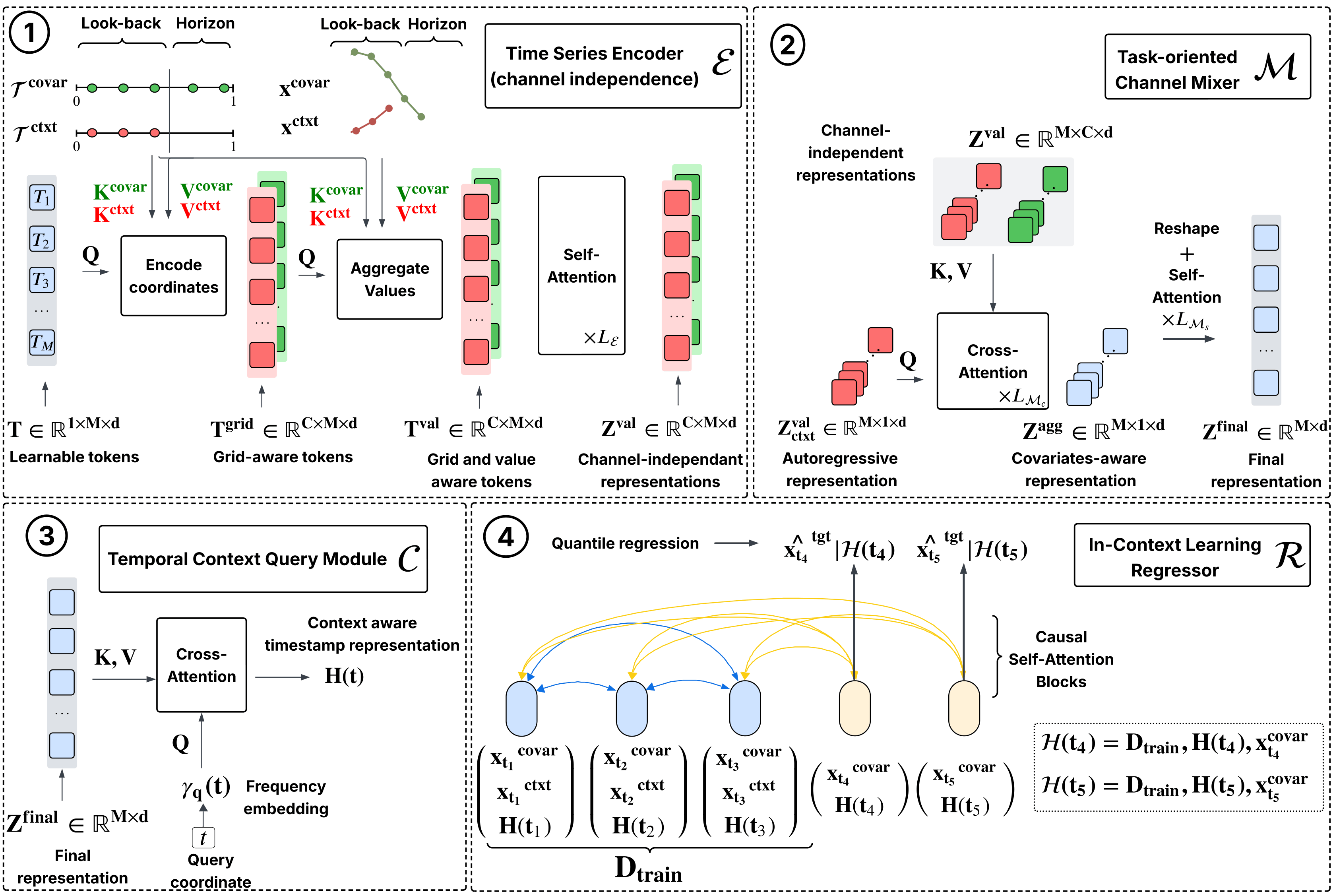
TS-ICL processes each time series through four successive modules:
Time Series Encoder
𝒮— a Perceiver-style architecture that compresses the observed (timestamp, value) pairs into M = 32 learnable latent tokens via cross-attention. It accepts inputs of arbitrary length without any preprocessing.Channel Mixer
𝓜— aggregates information across channels via cross-attention. In the univariate case this is a simple self attention operation; when covariates are present, it selectively integrates their latent representations into the target’s representation.Temporal Context Query Module
𝓅— maps any query timestamp to a context-aware embedding using Fourier (NeRF-style) positional encoding + cross-attention. Querying at arbitrary timestamps is what makes the model naturally handle irregular grids.In-Context Regressor
𝒫— a causal Transformer that reads the observed (representation, value) pairs as “in-context training examples” and predicts quantiles at the future positions using causal self-attention.
Key input convention#
TS-ICL is designed to be highly flexible, supporting various time series structures and alignment conditions.
(i) Supported Formats & Shapes
We natively accept inputs as NumPy arrays or Tensors (e.g., PyTorch).
Input Type |
Supported Shapes |
Description |
|---|---|---|
Context (``inputs``) |
|
L: Context length (look-back), N: Batch size. |
Covariates (``covars``) |
|
H: Forecast horizon, K: Number of covariate features. Should cover context and horizon for full benefit. |
(ii) Missing Data in the Look-back
Partially Observed Context: The context does not need to be fully observed —
NaNvalues are handled natively by the encoder.
⚠️ Note: For covariates known only during the context (unknown during the horizon), pass
NaNfor unobserved covariate positions.
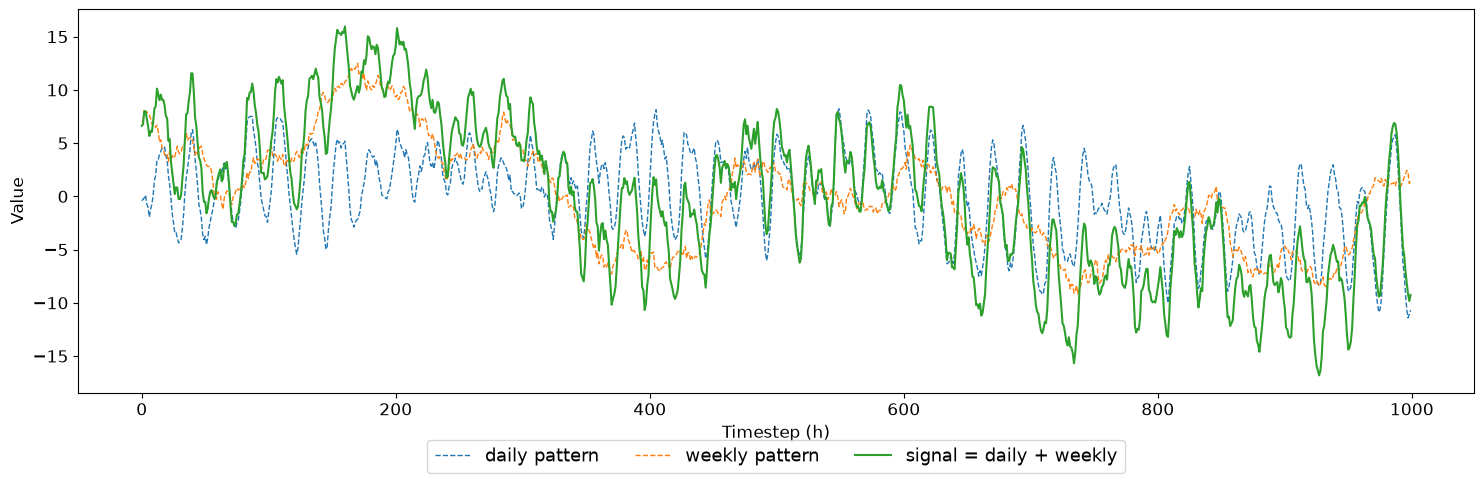
We generate a 1 000-point signal using two Gaussian Process draws:
``daily_pattern`` — periodic at 24 h with a slow-varying envelope (ExpSineSquared × Matérn)
``weekly_pattern`` — periodic at 168 h with a slow-varying envelope (ExpSineSquared × Matérn)
The two components are added to form the target signal. Keeping them separate lets us later use weekly_pattern as a covariate — a clean analogue of real-world scenarios where a low-frequency exogenous driver (temperature, irradiance) is continuously observed.
[27]:
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import ExpSineSquared, Matern
random_state = 91
np.random.seed(random_state)
T = 1000
t = np.arange(T, dtype=float).reshape(-1, 1)
# Daily pattern (period = 24 h)
kernel_daily = ExpSineSquared(length_scale=1.5, periodicity=24.0) * Matern(length_scale=200.0, nu=0.5)
gp_daily = GaussianProcessRegressor(kernel=kernel_daily, random_state=random_state)
daily_pattern = gp_daily.sample_y(t, random_state=random_state).flatten()
daily_pattern = 4.0 * (daily_pattern - daily_pattern.mean()) / daily_pattern.std()
# Weekly pattern (period = 168 h)
kernel_weekly = ExpSineSquared(length_scale=3.0, periodicity=168.0) * Matern(length_scale=500.0, nu=0.5)
gp_weekly = GaussianProcessRegressor(kernel=kernel_weekly, random_state=random_state)
weekly_pattern = gp_weekly.sample_y(t, random_state=random_state).flatten()
weekly_pattern = 5.0 * (weekly_pattern - weekly_pattern.mean()) / weekly_pattern.std()
signal = daily_pattern + weekly_pattern
t = t.flatten()
plt.figure(figsize=(15, 5))
plt.plot(t, daily_pattern, "--", lw=1.0, label="daily pattern")
plt.plot(t, weekly_pattern, "--", lw=1.0, label="weekly pattern")
plt.plot(t, signal, lw=1.5, label="signal = daily + weekly")
plt.xlabel("Timestep (h)")
plt.ylabel("Value")
plt.legend(loc="upper center", bbox_to_anchor=(0.5, -0.10), ncol=3, fontsize=13, frameon=True)
plt.tight_layout()
plt.show()
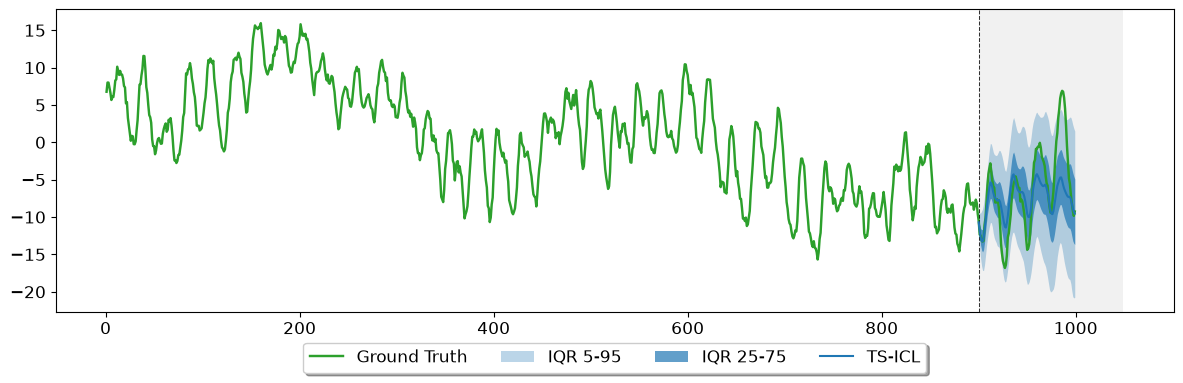
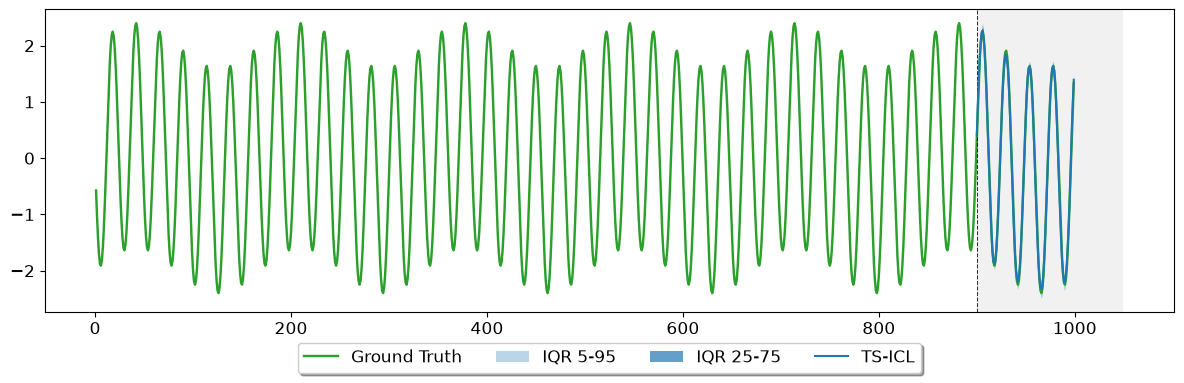
1.1 Univariate Forecasting#
We use the first 900 timesteps as the look-back context and ask the model to predict the next 100 — a ~4-day horizon for an hourly signal.
[28]:
context = 900
horizon = 100
quantile_levels = [0.01, 0.05, 0.1, 0.2, 0.25, 0.3, 0.5, 0.7, 0.75, 0.8, 0.9, 0.95, 0.99]
batch_p, batch_q = model.forecast(
inputs = signal[:context], # 1-D numpy array of length context
prediction_length = horizon,
context_length = context,
batch_size = 1,
device = device,
quantile_levels = quantile_levels,
point_estimator = "median", # 'mean' is also available
denormalize = True
)
# batch_p: [horizon]
# batch_q: [horizon, Quantiles]
pred_pointwise = batch_p.cpu().numpy()
pred_quantiles = batch_q.cpu().numpy()
print(f"Point prediction shape : {pred_pointwise.shape}")
print(f"Quantile prediction shape: {pred_quantiles.shape}")
Point prediction shape : (100,)
Quantile prediction shape: (100, 13)
model.forecast() returns two tensors covering only the forecast horizon (not the context):
``batch_p`` — point estimate, shape
[N, C, H, 1](usepoint_estimator='median'or'mean')``batch_q`` — quantile predictions, shape
[N, C, H, Q]
where N = batch size, C = number of channels (1 for univariate), H = prediction_length, Q = number of quantile levels.
plot_sample_forecast is included in the TS-ICL package. It displays the context window, the ground truth horizon, the median prediction, and the requested IQR bands.
[29]:
fig, ax = plot_sample_forecast(
quantiles = pred_quantiles, # [horizon, Q]
y_true = signal[-horizon:],
y_ctx = signal[:context],
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
1.2 Forecasting with a Partially Observed Look-back#
Patch-based foundation models divide the context into fixed-size windows and cannot handle NaN values natively. TS-ICL’s time-indexed encoder processes only the observed (timestamp, value) pairs, making it inherently robust to missing history — a common occurrence due to sensor outages, transmission failures, or irregular sampling.
Here we randomly drop 30% of the look-back observations and show that forecasting quality degrades only marginally.
[30]:
# ── Create partially observed look-back ───────────────────────────────
rng_partial = np.random.default_rng(7)
ctx_partial = signal[:context].copy()
mask_ctx = rng_partial.random(context) < 0.30
ctx_partial[mask_ctx] = np.nan
print(f"Missing in look-back: {mask_ctx.sum()} / {context} ({100 * mask_ctx.mean():.0f}%)")
_, batch_q_partial = model.forecast(
inputs = ctx_partial,
prediction_length = horizon,
context_length = context,
batch_size = 1,
device = device,
quantile_levels = quantile_levels,
denormalize = True
)
pred_partial_ctx = batch_q_partial.squeeze().cpu().numpy() # [horizon, Q]
fig, ax = plot_sample_forecast(
quantiles = pred_partial_ctx,
y_true = signal[-horizon:],
y_ctx = ctx_partial,
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL (30% missing context)",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
Missing in look-back: 275 / 900 (31%)
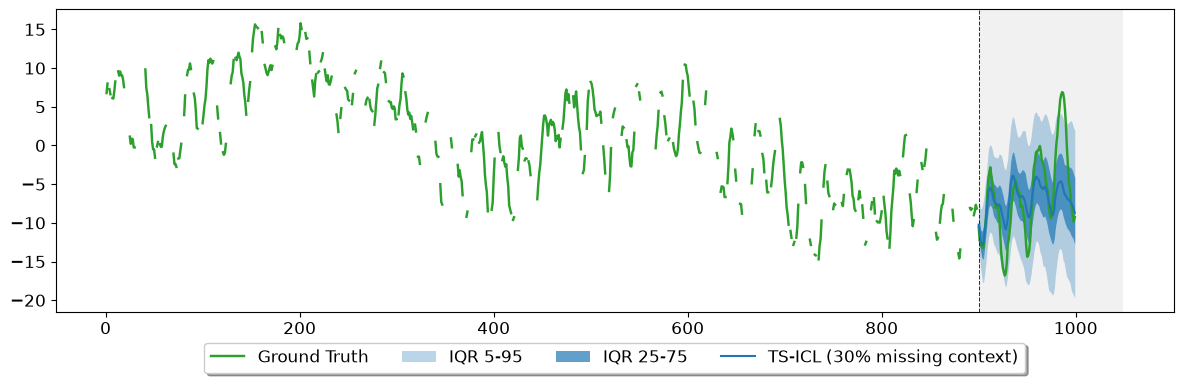
TS-ICL’s time-indexed design is robust to history degradation. Patch-based models require contiguous, fully-observed context windows and would need imputation as a pre-processing step — introducing an additional source of error.
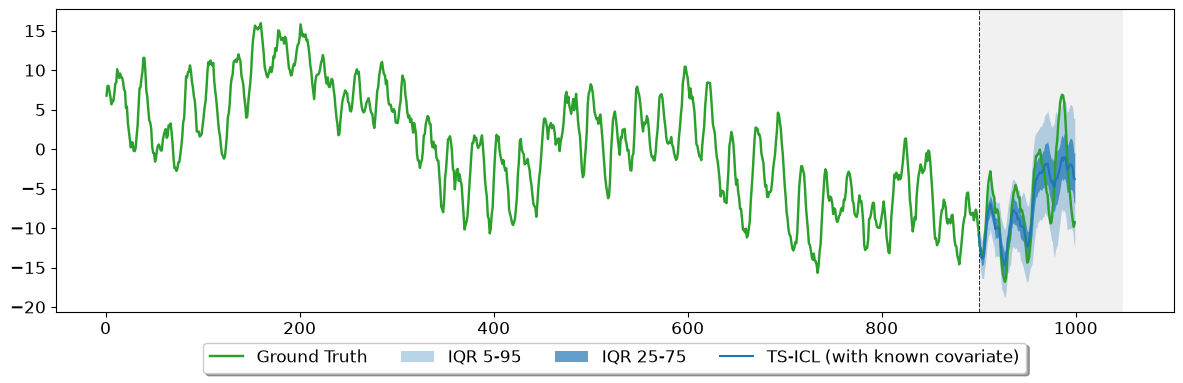
1.3 Forecasting with a Known Covariate#
Many real-world time series are driven by an exogenous process that can be observed or forecast independently. TS-ICL integrates any number of such covariates without retraining, using cross-attention in the Channel Mixer to selectively incorporate their information.
Examples evaluated in the paper (French transmission-system operator data):
Target |
Covariate |
Physical coupling |
|---|---|---|
Wind-farm power output |
Wind speed |
Power ∝ wind³ |
Solar PV production |
Surface solar irradiance |
Power ∝ irradiance |
National electricity load |
Mean outdoor temperature |
Temperature significantly impacts electricity demand levels |
In each case the covariate is known over the forecast horizon — wind and irradiance forecasts are available days ahead, temperature is closely tied to calendar season.
Our signal is the sum of daily_pattern and weekly_pattern. When forecasting a 100-point horizon, the model must extrapolate the weekly phase beyond what it has seen in the context. Supplying weekly_pattern as a fully-observed covariate — over the full 1 000 timesteps including the horizon — gives the model an exact anchor for the low-frequency component, so it can focus on predicting the daily fluctuations.
[31]:
# ── Inference WITH covariate ───────────────────────────────────────────────
# weekly_pattern spans T=1000 timesteps (context + horizon).
# The model uses it both to anchor the look-back and to sharpen the forecast.
_, batch_q_covar = model.forecast(
inputs = signal[:context],
prediction_length = horizon,
context_length = context,
batch_size = 1,
covars = weekly_pattern, # shape [T] covers context + horizon
device = device,
quantile_levels = quantile_levels,
denormalize = True,
)
pred_covar = batch_q_covar.cpu().numpy() # [horizon, Q]
fig, ax = plot_sample_forecast(
quantiles = pred_covar,
y_true = signal[-horizon:],
y_ctx = signal[:context],
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL (with known covariate)",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
[32]:
# ── Inference WITH past-only covariate ───────────────────────────────────────────────
# weekly_pattern spans L=900 timesteps (context).
_, batch_q_covar = model.forecast(
inputs = signal[:context],
prediction_length = horizon,
context_length = context,
batch_size = 1,
covars = weekly_pattern[:context], # shape [L] covers context
device = device,
quantile_levels = quantile_levels,
allow_covar_forecast = True, # allow covariate forecast
denormalize = True,
)
pred_covar_past = batch_q_covar.cpu().numpy() # [horizon, Q]
fig, ax = plot_sample_forecast(
quantiles = pred_covar_past,
y_true = signal[-horizon:],
y_ctx = signal[:context],
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL (with past-only covariate)",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
Quantitative comparison#
The table below evaluates predictions at the horizon positions and measures two things:
MAE (↓) — accuracy of the median forecast
Mean WQL (↓) — Weighted Quantile Loss across all quantile levels, assessing both calibration and sharpness
[33]:
q_idx = {q: i for i, q in enumerate(quantile_levels)}
y_true_missing = signal[-horizon:]
def horizon_mae(preds):
return np.mean(np.abs(y_true_missing - preds[:, q_idx[0.5]]))
def horizon_wql(preds):
"""
Computes the Mean Weighted Quantile Loss (WQL) across all quantile levels.
This version is normalized by the absolute sum of y_true (GluonTS/Amazon Forecast standard).
At quantile 0.5, it is mathematically equivalent to WAPE.
"""
wql_per_quantile = []
sum_y_true = np.sum(np.abs(y_true_missing))
for q in quantile_levels:
y_pred = preds[:, q_idx[q]]
error = y_true_missing - y_pred
# Compute Pinball Loss for the specific quantile q
pinball_loss = np.maximum(q * error, (q - 1) * error)
# Compute WQL for this specific quantile
wql_q = 2 * np.sum(pinball_loss) / sum_y_true
wql_per_quantile.append(wql_q)
# Return the average WQL across all quantiles
return np.mean(wql_per_quantile)
[34]:
mae_no = horizon_mae(pred_quantiles)
mae_co = horizon_mae(pred_covar)
mae_co_past = horizon_mae(pred_covar_past)
wql_no = horizon_wql(pred_quantiles)
wql_co = horizon_wql(pred_covar)
wql_co_past = horizon_wql(pred_covar_past)
col1_w, col2_w, col3_w, col4_w = 20, 16, 18, 22
header = f"{'Metric':<{col1_w}} {'No covariate':>{col2_w}} {'With covariate':>{col3_w}} {' With past-only covariate ':>{col4_w}}"
print(header)
print("─" * (len(header) + 12))
# MAE
check_co = '✅' if mae_co < mae_no else '⚠️'
check_past = '✅' if mae_co_past < mae_no else '⚠️'
print(f"{'MAE (↓)':<{col1_w}} {mae_no:>{col2_w}.4f} {mae_co:>{col3_w}.4f} {check_co} {mae_co_past:>{col4_w}.4f} {check_past}")
# Mean WQL
check_wql_co = '✅' if wql_co < wql_no else '⚠️'
check_wql_past = '✅' if wql_co_past < wql_no else '⚠️'
print(f"{'Mean WQL (↓)':<{col1_w}} {wql_no:>{col2_w}.4f} {wql_co:>{col3_w}.4f} {check_wql_co} {wql_co_past:>{col4_w}.4f} {check_wql_past}")
Metric No covariate With covariate With past-only covariate
───────────────────────────────────────────────────────────────────────────────────────────────────
MAE (↓) 3.0551 2.7468 ✅ 2.8529 ✅
Mean WQL (↓) 0.2516 0.1950 ✅ 0.2518 ⚠️
The results demonstrate how the model adjusts to covariate availability:
Full-horizon (``With known covariate``): Knowing the weekly phase across both past and future yields the best results, significantly dropping both MAE and Mean WQL by removing long-range uncertainty.
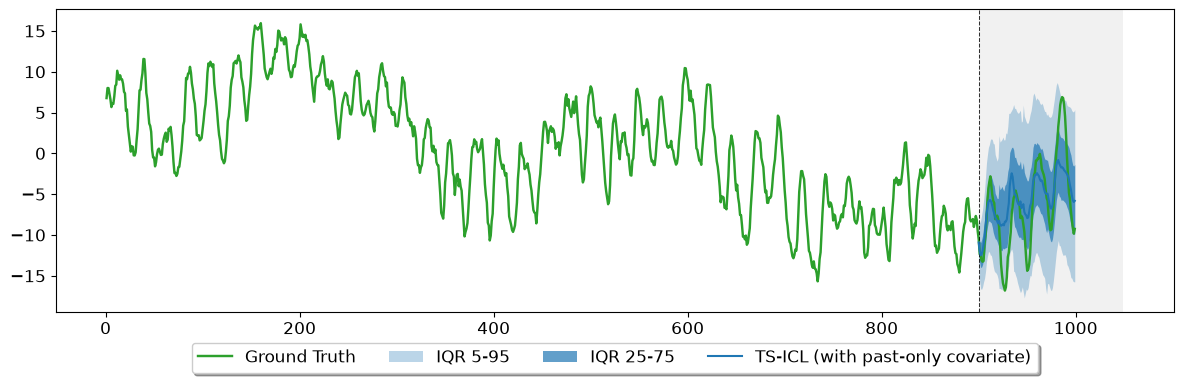
Past-only (``With past-only covar``): Providing covariate historical context only is still beneficial—it sharpens the median trajectory (lower MAE), though the lack of future visibility leaves the uncertainty boundaries (Mean WQL) on par with TS-ICL without covariate.
TS-ICL accommodates flexible covariate patterns. The covars tensor can span:
The full window (context + horizon) — The most informative case, yielding optimal metrics.
Context only (covariate unknown during the horizon) — Useful for anchoring the historical look-back.
A subset of timesteps — Pass
NaNfor unobserved positions; the model handles them.
To pass multiple covariates, stack them along the last dimension:
```python # Two covariates: shape [T, 2] covar_2 = np.random.randn(T) covars = np.stack([weekly_pattern, covar_2], axis=-1)
Part 2 — Understanding the Output Format#
Unlike imputation, which returns predictions at all T timesteps, forecasting returns predictions only at the ``prediction_length`` future positions. The context is not re-predicted.
Quantile indexing and calibration check#
[35]:
# ── Inspect output from section 1.1 ───────────────────────────────────────────
print(f"Shape: {pred_quantiles.shape} → {pred_quantiles.shape[0]} timesteps × {pred_quantiles.shape[1]} quantiles")
print("\nQuantile levels and column indices:")
for q, idx in q_idx.items():
print(f" [{idx:2d}] Q{int(q*100):02d} → first forecast step (t={context}): {pred_quantiles[0, idx]:.3f}")
Shape: (100, 13) → 100 timesteps × 13 quantiles
Quantile levels and column indices:
[ 0] Q01 → first forecast step (t=900): -12.585
[ 1] Q05 → first forecast step (t=900): -12.359
[ 2] Q10 → first forecast step (t=900): -11.923
[ 3] Q20 → first forecast step (t=900): -11.440
[ 4] Q25 → first forecast step (t=900): -11.270
[ 5] Q30 → first forecast step (t=900): -11.191
[ 6] Q50 → first forecast step (t=900): -10.704
[ 7] Q70 → first forecast step (t=900): -10.366
[ 8] Q75 → first forecast step (t=900): -10.247
[ 9] Q80 → first forecast step (t=900): -10.060
[10] Q90 → first forecast step (t=900): -9.516
[11] Q95 → first forecast step (t=900): -9.238
[12] Q99 → first forecast step (t=900): -8.021
[36]:
# ── Calibration check at the forecast horizon ──────────────────────────────────
y_true = signal[-horizon:]
mae = np.mean(np.abs(y_true - pred_quantiles[:, q_idx[0.5]]))
# Empirical coverage should match the nominal quantile level for a calibrated model
cov_80 = np.mean(
(y_true >= pred_quantiles[:, q_idx[0.10]]) &
(y_true <= pred_quantiles[:, q_idx[0.90]])
)
cov_50 = np.mean(
(y_true >= pred_quantiles[:, q_idx[0.25]]) &
(y_true <= pred_quantiles[:, q_idx[0.75]])
)
print(f"MAE at forecast horizon : {mae:.4f}")
print(f"80% interval coverage : {100 * cov_80:.1f}% (nominal: 80%)")
print(f"50% interval coverage : {100 * cov_50:.1f}% (nominal: 50%)")
print()
print("Coverage close to the nominal level indicates well-calibrated predictions.")
MAE at forecast horizon : 3.0551
80% interval coverage : 89.0% (nominal: 80%)
50% interval coverage : 59.0% (nominal: 50%)
Coverage close to the nominal level indicates well-calibrated predictions.
Part 3 — Batch Processing#
Stack multiple time series into a single [N, C, 1] tensor to forecast them in one call. The batch_size argument controls how many series pass through the model per forward pass — reduce it if you run out of GPU memory.
Variable-length series: if your series have different context lengths, pass a list of
[C_i, 1]tensors instead of a stacked tensor. The model handles variable lengths natively.
[37]:
N = 8
rng_batch = np.random.default_rng(99)
phases = rng_batch.uniform(0, 2 * np.pi, size=N)
t_batch = np.arange(T, dtype=float)
batch_signals = np.stack([
2.0 * np.sin(2 * np.pi * t_batch / 24 + phases[i])
+ 0.4 * np.sin(2 * np.pi * t_batch / 168)
for i in range(N)
], axis=0) # [N, T]
batch_ctx = batch_signals[:, :context] # [N, context]
# ── Batch inference ─────────────────────────────────────────────────────
batch_p_all, batch_q_all = model.forecast(
inputs = torch.tensor(batch_ctx, dtype=torch.float32).unsqueeze(-1), # [N, context, 1]
prediction_length = horizon,
context_length = context,
batch_size = 8, # process up to 8 series per forward pass
device = device,
quantile_levels = quantile_levels,
denormalize = True
)
preds_all_q = batch_q_all.squeeze(1).cpu().numpy() # [N, horizon, Q]
print(f"Batch output shape: {preds_all_q.shape} → {N} series × {horizon} timesteps × {len(quantile_levels)} quantiles")
Batch output shape: (8, 100, 13) → 8 series × 100 timesteps × 13 quantiles
[38]:
# ── Plot the first series in the batch ─────────────────────────────────────────
s = 0
fig, ax = plot_sample_forecast(
quantiles = preds_all_q[s], # [horizon, Q]
y_true = batch_signals[s, -horizon:],
y_ctx = batch_signals[s, :context],
quantile_levels = quantile_levels,
plot_iqr = True,
model_name = "TS-ICL",
iqr_bands = ((0.05, 0.95), (0.25, 0.75))
)
plt.show()
plt.close()
## Part 4 - Tips & Best Practices |
### Details on
|
The |
Configuration Parameters#
Parameter |
Type |
Default |
Description |
|---|---|---|---|
``prediction_length`` |
|
required |
Number of future timesteps to forecast. |
``context_length`` |
|
|
Length of the look-back window. Inferred from input shape if not provided. |
``batch_size`` |
|
|
The batch size used during the inference run. |
``quantile_levels`` |
|
|
Quantile levels to compute. Must be a subset of |
``device`` |
|
|
Target device for execution (e.g., |
``denormalize`` |
|
|
Whether to return values denormalized in original data space. |
``point_estimator`` |
|
|
Sets the pointwise estimator either as the average of all quantiles ( |
``squeeze_output`` |
|
|
If |
``allow_auto_complete`` |
|
|
Allow imputation of both the lookback window and/or the missing covariates, if any, and use the reconstructed values as extended context for the target time series. |
``allow_covar_forecast`` |
|
|
Allow forecasting of past-only covariates and use forecasted values as extended context for the target time series. |
Input Data Structures#
inputs#
The look-back context from which to forecast. NaN values within the context are handled natively — no prior imputation pre-processing is required. Accepts the following formats and shapes:
Multi-dimensional array-like (``torch.Tensor`` or ``np.ndarray``):
1D:
(context_length,)2D:
(batch, context_length)3D:
(batch, context_length, num_variates)wherenum_variates >= 1.
List of array-likes (``List[Tensor | ndarray]``): Each element can be 1D or 2D.
1D:
(context_length,)2D:
(context_length, num_variates)Note: ``context_length`` can vary across list elements, but ``num_variates`` must remain identical.
pandas DataFrame (``pd.DataFrame``): Must be 2-dimensional with shape
(batch, context_length).
covars (Optional)#
Exogenous features to sharpen the forecast. For maximum benefit, covariates should ideally extend over both the context and the forecast horizon. However, full coverage is not mandatory; you can provide past-only covariates as well as sparse covariates containing NaNs.
The expected covars_length can be equal to context_length + prediction_length, context_length only, or context_length filled with NaNs for the future horizon.
Multi-dimensional array-like (``torch.Tensor`` or ``np.ndarray``):
1D:
(covars_length,)(Single covariate)2D:
(batch, covars_length)(Single covariate)3D:
(batch, covars_length, num_covariates)wherenum_covariates >= 1.4D:
(batch, num_covariates, covars_length, 1)
List of array-likes (``List[Tensor | ndarray]``): Each element can be multi-dimensional:
1D:
(covars_length,)(Single covariate)2D:
(covars_length, num_covariates)wherenum_covariates >= 1.3D:
(covars_length, num_covariates, 1)
Returns#
The method returns a tuple (point_predictions, quantile_predictions). Both cover only the forecast horizon, not the context:
``point_predictions`` — Shape
(batch, num_variates, prediction_length, 1)``quantile_predictions`` — Shape
(batch, num_variates, prediction_length, len(quantile_levels))
Memory & throughput#
``batch_size``: reduce to 1–4 if you run out of GPU memory.
Maximum context: the forecasting checkpoint supports up to T = 4 096 context timesteps.
Inference speed: ~15.4 ms per window on an H100 GPU.
This notebook only scratches the surface — TS-ICL’s forecasting capabilities go well beyond what’s shown here. The best way to discover them is to read the documentation and experiment with your own data!